Setup robot

Install ROS
Prepare your robot according to the instructions in the Clearpath tutorial here. You should have Ubuntu 20.04 and ROS2 Foxy installed before following the tutorial.
Network
Basic network structure
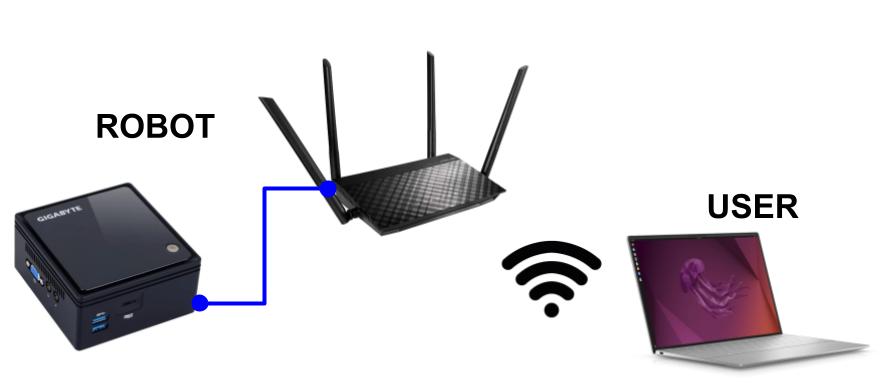
Make sure that the onboard router has access to the internet during the setup.
Depending on your router and onboard PC you may need to follow instructions included in NETWORK section.
To follow with this instruction you don’t have to follow official guidelines for setting network presented in Clearpath documentation.
Sensors
All sensors connected to the robot should be correctly identified at the startup to avoid serial port conflicts. If you want to connect new sensor over USB port, follow the instructions in the SENSORS.
Setup software
Husky packages
Packages can be built both on the onboard PC and user PC, however certain operations apply only to onboard PC.
Build workspace
mkdir -p ~/put_husky_ws/src
cd ~/put_husky_ws/src
git clone https://github.com/PPI-PUT/put-husky.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro=$ROS_DISTRO -y
colcon build --symlink-install
source install/setup.bash
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
echo "source ~/put_husky_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Setup udev rules
source ~/.bashrc
sudo cp $(rospack find husky_bringup)/udev/* /etc/udev/rules.d/
sudo cp $(rospack find husky_bringup)/debian/* /etc/udev/rules.d/
sudo udevadm control --reload-rules && sudo service udev restart && sudo udevadm trigger
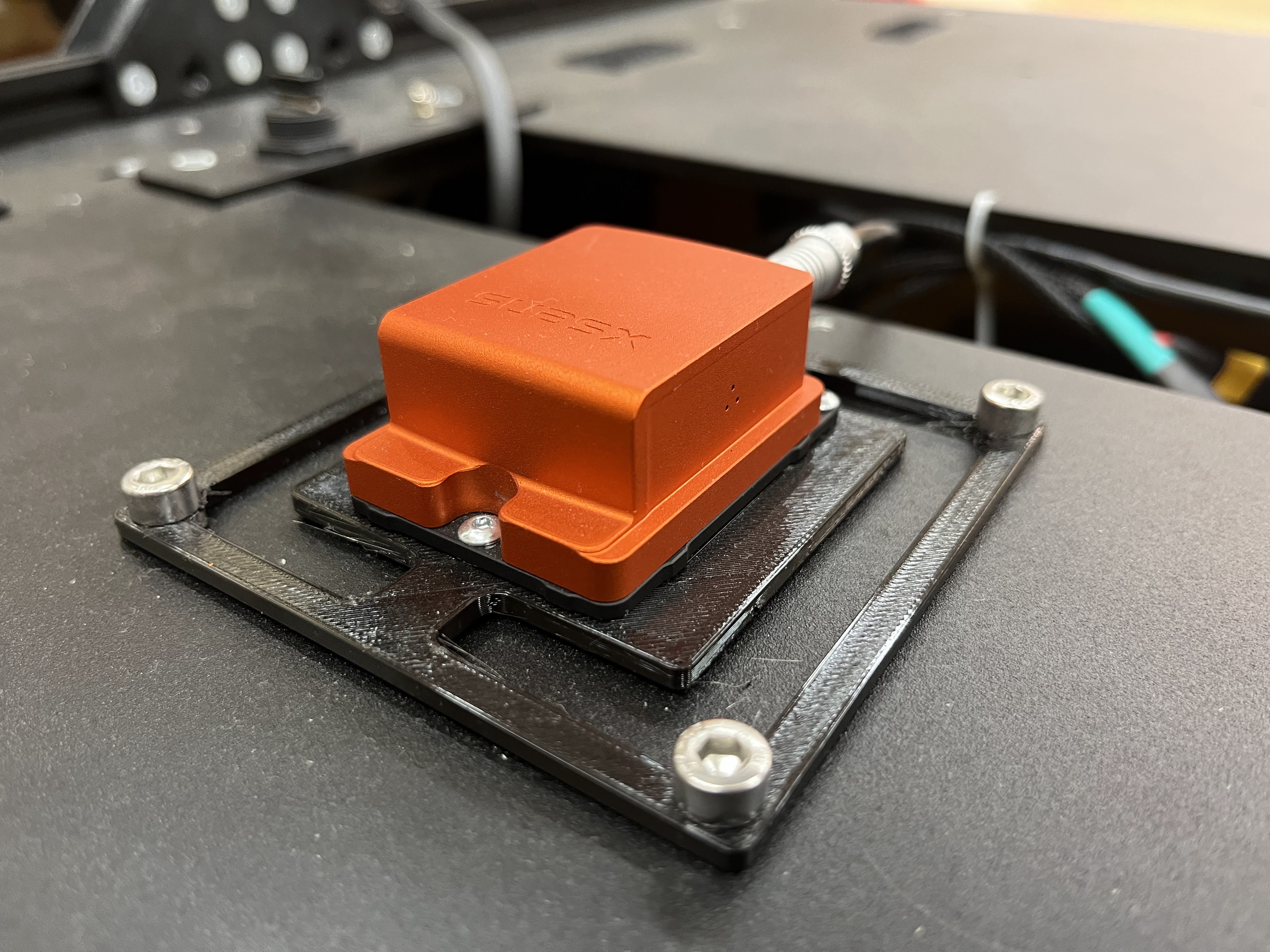
IMU integration
We use Xsens MTi-300 IMU for measurements.
Build workspace
mkdir -p ~/xsens_ws/src
cd ~/xsens_ws/src
git clone -b foxy-husky https://github.com/PPI-PUT/bluespace_ai_xsens_ros_mti_driver.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro=$ROS_DISTRO -y
colcon build --symlink-install
source install/setup.bash
echo "source ~/xsens_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Setup udev rules
source ~/.bashrc
sudo cp $(rospack find bluespace_ai_xsens_ros_mti_driver)/udev/* /etc/udev/rules.d/
sudo udevadm control --reload-rules && sudo service udev restart && sudo udevadm trigger
Startup install
Run below script only on robot to enable ROS packages at the robot startup.
Install Husky
source ~/.bashrc
ros2 run husky_bringup install
Install IMU
ros2 run bluespace_ai_xsens_ros_mti_driver install
To verify installation you can run
journalctl -a -b | grep ros
to make sure no errors occured during startup. You can compare you out put with ours at example_output.md.
Visualization
TODO